







2023/09/18
964
带你了解7种主要工业机器人 - 广州国际铸造
2024年广州国际铸造、压铸及锻压工业展览会即将于2024年3月4-6日在中国进出口商品交易会展馆B区举行。邀您关注今日新资讯:
工业机器人是自动化机器,旨在比人类更快、更高效、更精确地执行重复性、危险性和艰巨的任务。它们减少了人类的依赖,并提高了它们所属流程的生产力和能力。从合适的制造商那里选择合适的机器人是建立成功工业企业的关键。

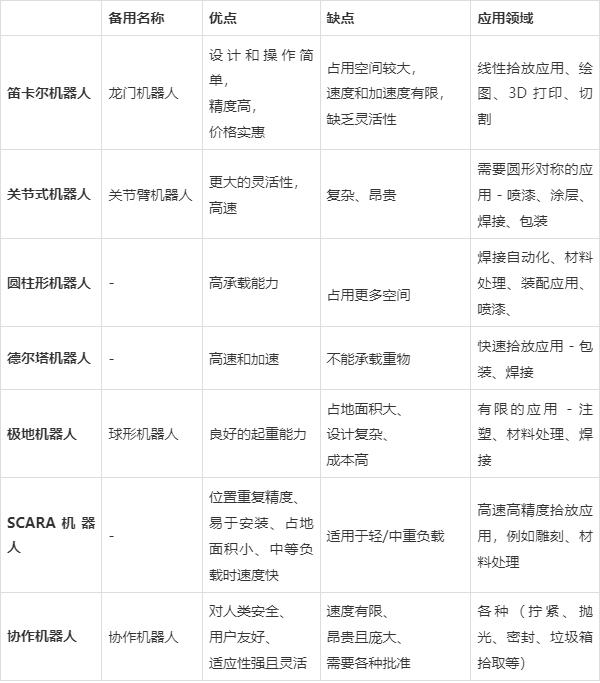
在本文中,我们提供了工业中使用的不同类型机器人的完整概述。我们列出了它们的优点、缺点和一些应用,以了解它们的设计如何影响其工业应用。
介绍
机器人的概念对人类来说并不陌生。在各种古代神话书籍和文物中都可以找到帮助人类进行日常活动的设备的传说。然而,直到 19 世纪,新的机械、电气和电子技术才使得机器人技术取得了重大发展。
随着机电系统的能力似乎达到顶峰,信息和通信技术的进步使机器人能够进一步发展并提供比以往更好的功能。机器人已成为我们生活的重要组成部分,几乎应用于当今所有行业。
典型的工业机器人由以下功能元件组成:
-
控制器: 是为机器人提供运行所需的内存和处理能力的组件。机器人控制器充当整个控制系统的大脑。
-
传感器:机器人使用传感器从周围环境收集数据。传感器是机器人的眼睛和耳朵。
-
驱动和动力源: 机器人可以使用电气、气动、液压或任何其他驱动装置来获取和转换其操作所需的动力。
-
机械臂:机械臂旨在模仿人类手臂,是由通过关节/连杆连接的多个部分组成的结构。可以对关节进行编程,使其沿所需方向移动。
-
手臂末端工具 (EOAT)/末端执行器: EOAT 是连接在机械臂末端的定制设备/执行器,用于执行特定操作,例如焊接、物料搬运、喷漆、装配等。一些工业机器人支持交换EOAT 让它们执行不同的操作。
工业机器人有哪些不同类型,它们的应用是什么?
市场上存在不同类型的工业机器人,它们都有各自的优点和缺点。本节介绍最常见类型的工业机器人的工作原理,并列出它们的一些优点、缺点和应用。
笛卡尔机器人
笛卡尔机器人,也称为龙门机器人,是一种在空间中执行线性运动的工业机器人。它们沿着彼此正交/垂直的 x、y 和 z 轴移动。笛卡尔机器人形成一个立方体工作区域/外壳。
这些机器人的名字来源于笛卡尔坐标系,该坐标系将空间中的点表示为距预定义轴的最短距离的函数。笛卡尔坐标系由勒内·笛卡尔 (René Descartes) 开发,他是一位著名的法国数学家,以通过其著作将几何与代数(以前被认为是独立的)联系起来而闻名。
直角坐标机器人的主要优点:
-
设计和操作简单:笛卡尔机器人因其简单性而受到青睐。由于它们仅沿 x、y 和 z 轴直线移动,因此易于构建、编程和操作。
-
精度高: 由于设计和操作方便,直角坐标机器人可以被精确控制。它们的运动极其精确,非常适合高精度应用。
-
经济实惠: 直角坐标机器人结构简单,并且能够针对各种流程进行重新配置,因此具有成本效益。
笛卡尔机器人的主要缺点:
-
占用更多空间:在所有工业机器人中,直角坐标机器人需要最多的操作空间。
-
速度和加速度有限:笛卡尔机器人运动缓慢,不适合某些需要快速操作的应用。
-
缺乏灵活性:笛卡尔机器人仅适用于其设计的特定运动。很难让它们适应其他任何事情。
笛卡尔机器人用于拾取和放置应用,这在包装和检查中很常见。它们还用于实现切割、绘图、3D 打印和 CNC 应用的自动化。
关节式机器人
关节型机器人是具有旋转关节的工业机器人。这些关节通常由伺服电机提供动力,称为机器人的轴。简单的关节式机器人的运动类似于人类手臂的运动。在复杂的设置中,此类关节的数量可以达到甚至超过 10 个。关节式机器人也称为关节臂机器人。
关节型机器人的主要优点:
-
更大的灵活性:关节式机器人具有多个旋转关节,使其适合各种运动。
-
高速: 铰接式机器人可以高速工作,是提高其所属流程生产率的出色工具。
铰接式机器人的主要缺点:
-
复杂: 具有旋转关节的机器人的制造工艺比那些执行线性或横向运动的机器人更复杂。旋转接头需要更多的零件,并且在制造时需要仔细考虑。
-
昂贵: 由于关节机器人的结构复杂,制造和操作具有挑战性,这使得它们的拥有和维护成本高昂。
铰接式机器人是一类包含多种不同类型机器的机器人。因此,应用程序的列表是巨大的。仅举几例,这些机器人用于喷漆、涂层、焊接和包装。
圆柱形机器人
圆柱形机器人是在底座处具有旋转接头的工业机器人,该旋转接头通过具有棱柱形接头的臂连接至轴。该机器人具有三个运动轴,其中两个是线性的,一个是圆形的。连接到机器人底座的轴可以旋转,手臂可以上下移动,甚至延伸形成圆柱形工作范围。
尽管圆柱形机器人的历史并没有很好的记录,但 20 世纪 60 年代初的美国机械铸造厂 (AMZ) Versatran 机器人可以被认为是最早的圆柱形机器人。
圆柱形机器人的主要优点:
-
高承载能力:圆柱形机器人可以利用强大的机械臂轻松搬运重物。
圆柱形机器人的主要缺点:
-
占用更多空间: 圆柱形机器人占用大量地面空间,并且没有提供许多显着的优势,因此与其他工业机器人相比,它们不太受青睐。
圆柱形机器人可用于焊接自动化、物料搬运、装配操作、喷漆以及其他一些需要圆形对称工作的应用。
德尔塔机器人
Delta 机器人是在刚性三角形框架上制造的工业机器人。该框架安装在工作区域的正上方,每个臂都装有一个高扭矩伺服电机。电机的轴连接到一个称为“二头肌”的臂,该臂沿电机旋转轴的垂直方向延伸。二头肌的另一端连接到平行四边形排列的杆。根据应用的不同,平行四边形杆可以连接到各种 EOAT 机械手。
机器人的大部分重量来自连接在装置底部的电机,这使得移动部件变得更轻。因此,运动部件具有低惯性,可以快速加速并高速工作。
Delta 机器人是由瑞士联邦理工学院 (EPFL) Reymond Clavel 博士领导的研究团队于20 世纪 80 年代开发的。Delta 机器人的灵感来自于参观一家巧克力工厂,那里需要将巧克力果仁糖放入盒子中。
台达机器人的主要优势:
-
高速、加速: 由于运动部件惯性小,台达机器人可以快速加速并高速工作。
Delta 机器人的主要缺点:
-
无法承载重物: Delta机器人的轻型运动部件不适合承载重物。
台达机器人擅长医疗和食品加工行业所需的快速拾取和放置应用。它们还用于包装和焊接。
极地机器人
极地机器人,或称球形机器人,是一种具有两个旋转关节和一个线性关节的工业机器人。机器人的旋转运动和垂直提升可以通过旋转关节实现。线性关节有利于机械臂的延伸,使其能够扩展其周围的工作空间,从而形成球形工作包络线。
这些机器人的名字来源于极坐标系,在该坐标系中,空间中的每个点都以其距原点的距离以及它与绕原点的轴形成的角度为特征。
极地机器人的想法最初是由 Victor Scheinman 于 1969 年发明的斯坦福机械臂提出的。它是第一批可以在完全计算机控制下在太空中移动的电动机器人手臂之一。
极地机器人的主要优点:
-
良好的举重能力: Polar机器人凭借其强大的关节可以轻松举起重物。
极地机器人的主要缺点:
-
占地面积大: 极地机器人的设计并没有真正充分利用可用的工作空间,这使得这些机器人体积庞大。
-
设计复杂: 由于关节数量较多,极地机器人设计复杂。
-
成本高:由于设计复杂,台达机器人的采购和维护成本高昂。
由于铰接式机器人的优越性能,目前极地机器人大多被铰接式机器人取代。它们仍然用于注塑、材料处理、焊接和其他一些通用应用。
SCARA机器人
SCARA 是选择性顺应性装配机器人手臂/选择性顺应性铰接式机器人手臂的缩写。顾名思义,SCARA 是带有旋转接头的特殊铰接机器人。它们在 x 轴和 y 轴上具有机械顺应性,在 z 轴上具有刚性。
早在 1978 年,日本山梨大学的 Hiroshi Makino 教授就开发出了第一台 SCARA 机器人原型。它与当时其他机器人的区别在于它以有限的运动执行不同任务的方式。SCARA 机器人于 1981 年进入商业制造工厂,并提供了物超所值的性能。
SCARA 机器人的主要优势:
-
重复定位精度: 在所有关节型机器人中,SCARA 是定位重复定位精度最好的机器人。
-
易于安装且占地面积小: SCARA 机器人在底座上旋转,可以通过地板安装轻松安装在坚硬的表面上。安装座的占地面积很小,可以防止对附近物体造成阻碍。
-
中等负载的高速: SCARA 可以牢固地安装在表面上,而不是悬挂在工作区域上(如 Delta 机器人),这使得它们更能抵抗冲击。与德尔塔机器人和笛卡尔机器人等其他类型的机器人相比,这使得它们能够以更快的速度处理更重的有效载荷。
SCARA 机器人的主要缺点:
-
适用于轻/中重负载: SCARA 机器人通常设计用于搬运重达 10 公斤的负载,这使得它们不适合处理重物体。
SCARA 机器人的主要应用包括需要高精度的高速拾放任务。它们是高度通用的机器人,可用于雕刻、材料搬运等应用。
协作机器人
协作机器人或协作机器人是与人类共享工作空间的工业机器人。这些机器人与人类合作并完成其设计的任务。由于协作机器人预计将在人类周围运行,因此它们的设计是安全的。
协作机器人使用不同的传感器来确保它们检测意外的人类行为并安全运行。有时,当有人在附近时,协作机器人会以较低的速度和力量工作。然而,即便如此,它们也必须保持生产力和效率,才能真正值得在工业领域使用。
由于存在如此多的约束和组件,协作机器人的设计变得非常复杂。它们的成本很高,但可以确保提高与之合作的人员的整体生产力。
协作机器人的主要优点:
-
对人类安全: 协作机器人对于人类来说是完全安全的。与典型的工业机器人不同,协作机器人具有柔软的外壳和各种传感器,让人们可以与它们一起工作而不会受伤。
-
用户友好:协作机器人具有非常用户友好的界面。它们是根据人类行为构建的,因此交互感觉尽可能自然。
-
适应性强且灵活: 协作机器人可以轻松地针对不同的应用进行重新配置。
协作机器人的主要缺点:
-
有限的速度: 为了确保周围工作人员的安全,协作机器人必须以有限的速度工作,即使它们有能力加快速度。
-
昂贵且庞大: 由于添加了安全功能所需的所有传感器,协作机器人价格昂贵,而且通常比其他不在人类周围工作的机器人笨重。
-
需要各种批准: 世界各国都有不同的规则,以确保与人类协作的机器人绝对安全。获得构建和调试协作机器人所需的所有许可可能是一个漫长的过程。
协作机器人有大量应用,包括拧紧、抛光、密封、垃圾箱拾取等。
总结
从用于执行重复动作的简单机械工具到高度集成且可靠的实体,可以通过编程来完成几乎任何事情,工业机器人自首次开发以来已经取得了长足的进步。人工智能的快节奏创新与机电一体化的最新发展相结合,将继续塑造下一代工业机器人。
文章来源:百度
2024年广州国际铸造、压铸及锻压工业展览会即将于2024年3月4-6日在中国进出口商品交易会展馆B区举行;展会更多资讯,详情请登陆官网 https://fd-asia.gymf.com.cn
扫码实名预约,领取入场证!

| 凡本网注明“来源:广州光亚法兰克福展览有限公司”的所有作品,版权均属于广州光亚法兰克福展览有限公司,转载请注明。 凡注明为其它来源的信息,均转载自其它媒体,转载目的在于传递更多信息,并不代表本网赞同其观点及对其真实性负责。若作者对转载有任何异议,请联络本网站,联系方式:020-38217916;我们将及时予以更正。 |

领先铸造、压铸及锻压工业国际贸易平台
欢迎莅临广州国际铸造、压铸及锻压工业展览会!
主办单位官方微信

